一、PID基础
在控制系统工程中,PID(Proportional-Integral-Derivative)控制器是一种用于调节系统的常见控制算法。PID控制器有三个主要参数,分别是Kp、Ti(也称为Tn)、和Td(也称为Tv)。
- Kp(比例增益):Kp是比例增益参数,它控制了控制器对误差的比例响应。增加Kp会增强控制器的响应速度,但可能导致系统过冲和振荡。
- Ti(积分时间,有时也称为Tn,即积分时间的倒数):Ti是积分时间参数,它控制了控制器对误差的积分响应。增加Ti会减小系统的稳态误差,但可能增加系统的超调。=>个人总结,若长时间没有回到参考值,则会时间累计导致增大输入,实现控制平衡。
- Td(微分时间,有时也称为Tv):Td是微分时间参数,它控制了控制器对误差变化率的微分响应。增加Td可以提高系统的抗干扰性能,但也可能导致控制器对噪声敏感。=》个人总结,针对误差变化率,预测下一个误差,在快速控制的场景中,可以加快控制平衡。
这些参数的具体值取决于控制系统的需求和性能要求,通常需要进行系统的调试和优化来确定最佳的参数值。不同的系统可能需要不同的参数组合,以实现所需的控制性能。

二、PID调节讲解
PID整定口诀
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢,微分时间应加长
理想曲线两个波,前高后低四比一
一看二调多分析,调节质量不会低
2.1 一套视频讲解
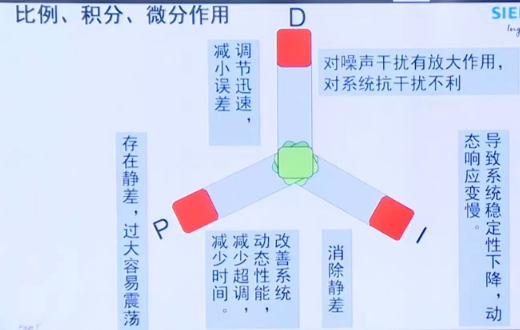
对应稳准快三特性,P对应快速性,I对应准确性,D对应稳定性。
P调大,反应速度快了,但是出现了超调,指针出现抖动,
D调大,P不变,增大D,反应速度慢了,但是抖动消失了,且指针存在一定误差(没和下面对准)
I调大,P,D不变,在原来基础上,误差变小了
2.2另外一套视频讲解
2.3知乎文章

简短PID代码(来源Bilibili)
#作者:B站‘程欢欢的智能控制集’
#QQ群:245234784
#一、声明
import sensor, image, time,car,math
from time import sleep as 等待
from pyb import millis as 系统运行时间
#二、设置摄像头
屏幕=car.screen()
import screen_set #对于小车屏幕的特殊设置,使屏幕反向显示
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
led=car.led() #声明led
led.turn_on() #打开led
sensor.skip_frames(time = 1000) #延迟1秒等待摄像头校准亮度、白平衡
sensor.set_auto_gain(False) #关闭自动亮度
sensor.set_auto_whitebal(False) #关闭自动白平衡
sensor.set_auto_gain(False,gain_db=-100) #降低曝光度
sensor.set_contrast(3) #提高对比度
sensor.set_brightness(-3) #降低亮度
clock = time.clock()#声明时钟,用于获取帧速
#三、创建常量
白球阈值=(75, 100, -20, 20, -20, 20)
画面中点=(320/2,240/2)
X轴舵机端口号=0
Y轴舵机端口号=1
X轴舵机中点=90
Y轴舵机中点=90
X轴舵机范围=(-35,35)
Y轴舵机范围=(-35,35)
#四、子函数:控制平台
舵机=car.servo_motor() #声明舵机
def 控制平台(x,y):
global X轴舵机端口号,Y轴舵机端口号,X轴舵机范围,Y轴舵机范围,X轴舵机中点,Y轴舵机中点
if x<X轴舵机范围[0]:
x=X轴舵机范围[0]
if x>X轴舵机范围[1]:
x=X轴舵机范围[1]
if y<Y轴舵机范围[0]:
y=Y轴舵机范围[0]
if y>Y轴舵机范围[1]:
y=Y轴舵机范围[1]
舵机.degree(X轴舵机端口号,X轴舵机中点-x) #x轴,向右减小
舵机.degree(Y轴舵机端口号,Y轴舵机中点-y) #y轴,向上增加
控制平台(0,0) #执行一次控制平台,使平台归零
#五、创建变量
# 因为X轴和Y轴相互独立。所以使用了两套闭环系统、两套PID。所以下列变量,
#大部分是两个元素的列表。其中第一个元素为X轴所用,第二个为Y轴所用。
比例P系数=[0.2,0.2] #需要调参 #调好的参数:P=0.2 I=0.23 D=0.064
积分I系数=[0.23,0.23]
微分D系数=[0.064,0.064]
积分I最大值=[5,5] #调好的参数;5
比例P=[0,0] #系统自动使用的变量
积分I=[0,0]
微分D=[0,0]
偏差量=[0,0]
上一次偏差量=[0,0]
执行量=[0,0]
小球位置=[0,0]
目标量=[320/2,240/2]
计时=系统运行时间()
画圆移动角度=0 #手动输入
画圆移动半径=30
画圆移动速度=10 #越小越快
模式='点触' #模式分 点触 和 自动
#六、主循环
while(True):
clock.tick() #用于获取帧速
#1)获取图像,并识别小球位置
图像 = sensor.snapshot()
小球色块们 = 图像.find_blobs([白球阈值])
if 小球色块们:#如果找到结果
小球色块 = max(小球色块们, key = lambda b: b.pixels())#按结果的像素值,找最大值的数据。也就是找最大的色块。
if 小球色块.w()>20 and 小球色块.h()>20:#过滤掉长宽小于20的结果
图像.draw_rectangle(小球色块[0:4],color=(255,0,0))#按寻找色块结果的前四个值,绘制方形,框选识别结果。
图像.draw_cross(小球色块.cx(),小球色块.cy(),color=(255,0,0))#用结果的中心值坐标,绘制十字
小球位置=[小球色块.cx(),小球色块.cy()]
else:#没有找到小球
积分I=[0,0] #积分I清零
小球位置=目标量 #告知系统小球达到目标,使系统停转
else:#没有找到小球
积分I=[0,0] #积分I清零
小球位置=目标量 #告知系统小球达到目标,使系统停转
#2)计时
运行时间=(系统运行时间()-计时)/1000
计时=系统运行时间()
#3)PID部分
for n in range(0,2):
偏差量[n]=目标量[n]-小球位置[n]
比例P[n]=偏差量[n]*比例P系数[n]
积分I[n]=积分I[n]+偏差量[n]*积分I系数[n]*运行时间
if 积分I[n]>积分I最大值[n]:
积分I[n]=积分I最大值[n]
elif 积分I[n]<-积分I最大值[n]:
积分I[n]=-积分I最大值[n]
微分D[n]=(偏差量[n]-上一次偏差量[n])*微分D系数[n]/运行时间
上一次偏差量[n]=偏差量[n]
执行量[n]=比例P[n]+积分I[n]+微分D[n]
#4)控制平台-执行量输入执行器
控制平台(执行量[0],执行量[1])
#5)在屏幕上写字PID数值、绘制目标框
图像.draw_string(0,0,'ERR:'+str(偏差量),color=(255,0,0))
图像.draw_string(0,10,'P:'+str(比例P),color=(255,0,0))
图像.draw_string(0,20,'I:'+str(积分I),color=(255,0,0))
图像.draw_string(0,30,'D:'+str(微分D),color=(255,0,0))
图像.draw_cross(round(目标量[0]),round(目标量[1]),thickness=3,color=(0,0,255))#用结果的中心值坐标,绘制十字
图像.draw_cross(round(目标量[0]),round(目标量[1]),thickness=1,color=(255,255,0))#用结果的中心值坐标,绘制十字
#6)通过触屏给定目标量,或自动控制目标量画圆
屏幕.get_touch() #获取触屏数据
if 屏幕.touch_exist(): #如果存在触摸
if 48<屏幕.touch_x()<80 and 200<屏幕.touch_y()<240: #触摸坐标在第一个按键内
模式='自动'
elif 0<屏幕.touch_x()<40 and 200<屏幕.touch_y()<240:#触摸坐标在第二个按键内
模式='点触'
elif 模式=='点触': #点触模式下,根据触摸改变目标点位置。因为屏幕倒置,所以坐标需要反向
目标量=[320-屏幕.touch_x(),240-屏幕.touch_y()]
if 模式=='点触': #点触模式下,绘制两个按键的颜色框
图像.draw_rectangle(280,0,40,40,thicness=2,color=(0,255,0))
图像.draw_rectangle(239,0,40,40,thicness=2,color=(255,0,0))
elif 模式=='自动': #自动模式下,绘制两个按键的颜色框
图像.draw_rectangle(280,0,40,40,thicness=2,color=(255,0,0))
图像.draw_rectangle(239,0,40,40,thicness=2,color=(0,255,0))
#通过三角函数,让目标量以画形轨迹移动。反斜杠是换行符,自动连接上下两行语句
目标量=[画圆移动半径*math.cos(画圆移动角度)+画面中点[0],\
画圆移动半径*math.sin(画圆移动角度)+画面中点[1]]
画圆移动角度+=math.pi/画圆移动速度 #累加角度。注意程序使用弧度制表示角度。
if 画圆移动角度>math.pi*2: #角度达到一圈后归零。
画圆移动角度=0
#7)显示图像到屏幕
屏幕.display(图像) #在屏幕上显示图像
print(clock.fps()) #打印帧速
